2L2v1の構造設計
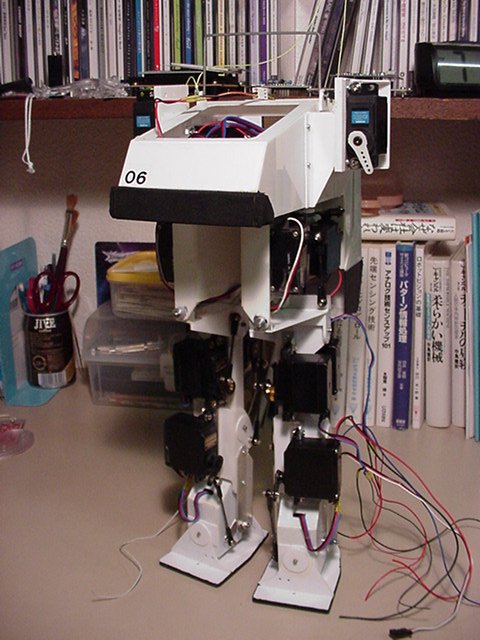
下の図を以って作れるところまでまとまったと感じたので、すねの部分から 詳細な寸法をつめて製作を開始しました。 うまく出来上がったら、2L1v6よりも少し歩行性能が良くなると思います。
2L2v1のスネ

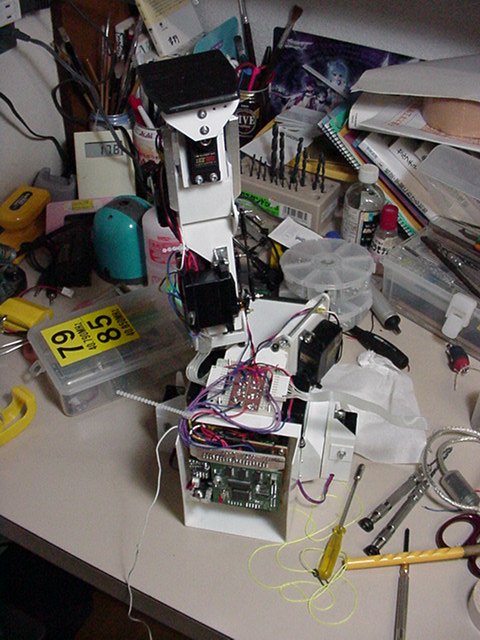
2L2v1の右脚
1番と3番関節のリンクの接続位置を見直し、v6の歩行パターンでよく使った 範囲が、関節の可動範囲の中心に来るようにしました。各関節の可動範囲はv6と 同程度の狭さですが、実際に使える範囲は多分これで増えると思います。
全体的にサーボロッド(リンク)が長くなったので、たわみがどの程度になるかが気がかりです。

配線ルート等の変更
配線ルートの変更
動力系の電源ラインの引き回し方を変えています。うまく電圧が安定するように 引かないと、脚の震えが止まらなくなります。容量不足にならないように 気をつけながら製作を進めているつもりですが、これまた動かしてみるまで 楽しみというか、少し不安です。
機械部品の製作効率
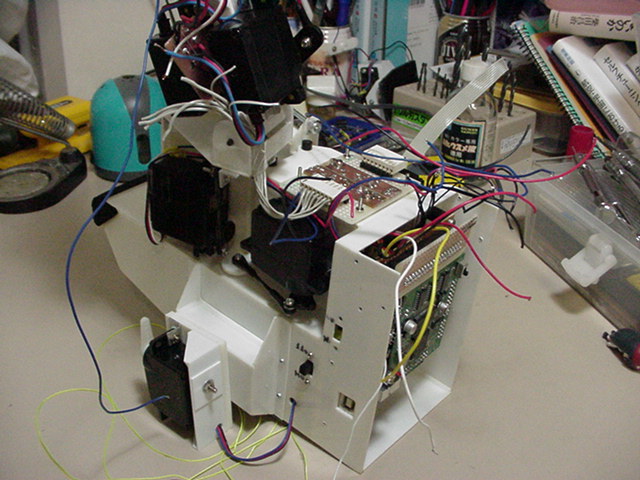
右脚サーボの配線
気づいた時が直し時ということで回路、回路図、ソースコード、コメントの整合をとっておきました。

動力系統の電池
話は変わりますが、パソコン等用の燃料電池の発売が待ち遠しいです。現在メーカーの発表では 1~2年の内に発売とかいうことですが、是非頑張ってほしいものです。これが出れば、小型ロボットにも 「実用」を期待できる可能性が増すと思います。
関節パラメータファイルの作成
各RCサーボの変換係数は今まで使っていた数値をとりあえず入れておきます。 この数値は、逆運動学計算サブルーチンが出来た後で動かしながら調整します。
サーボモーターの配置はだいぶ変わりましたが、リンクの構成は変わっていないとみなせるため ファイルの構造には変更ありません。
5番サーボ(ヨー軸)の交換
逆運動学計算サブルーチンの改造
計算自体の改造に加え、足先の軌道が足の到達範囲から外れている点を含んでいる 時に出るエラーメッセージ の出し方を改善中です。今までは、軌道のどのポイントでエラーになったのかが今ひとつ 分かりにくくなっていました。
またエラーの理由として、物理的に到達範囲を外れたのか、関節の可動範囲を超えたのかも区別して 出力するようにしました。(今までは一律に「エラー」でした)
片足の負荷テスト
SCB8用プログラムの修正
これはこれで消費電力が抑えられて良い気もしましたが、以前から初めの一歩に入るまでの 安定がどうも悪いと感じていましたので、コマンド待ちの時にサブCPUと通信してRC コマンドを受け取る頻度を減らし、待機中もだいたい50Hzを保つように修正しました。
Ni-MH電池用充電器の準備

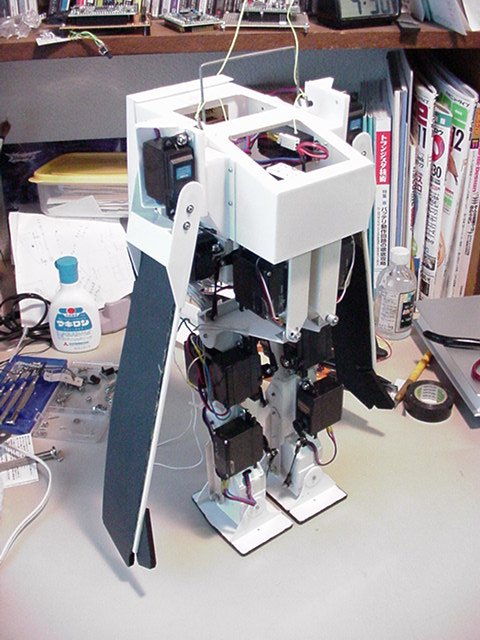
左脚の製作
ひざ関節の穴あけで少々ミスをし、ヒザがO脚になってしまいました。
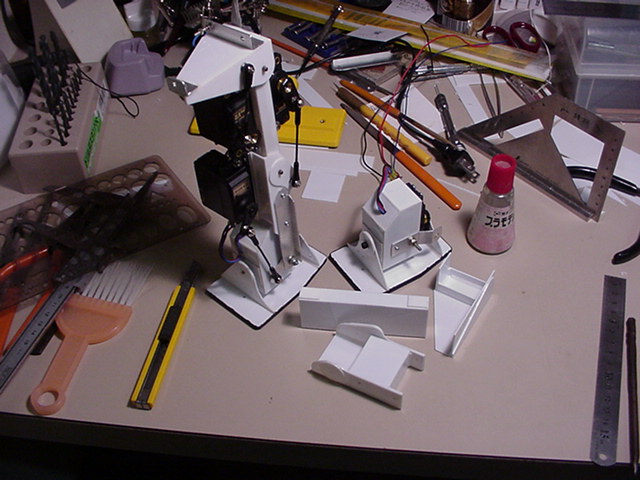
左脚の製作
この後は「左脚の配線」->「関節パラメータの調整」と作業すると、2L1v6の歩行 パターンで歩けるようになります。異常無く歩くようならば、もう少しスムーズに、早く 歩くような歩行パターンを試してみようと思います。
あと、現在構想中なのですが、操縦して遊ぶゲームを面白くする要素として高速
移動用に「駆動輪有りの
インラインスケート」見たいな物を内蔵した足も作ってみたいと考えています。
アニメの「装甲騎兵ボトムズ」の「ローラーダッシュ」みたいな機能です。
今のまま「高速移動」を試みると、クラッシュした時にバラバラになるのが
見えている気がするので、どうやってラジコンカーみたいな丈夫さを出すかが
課題だと思います。
関節パラメーターファイルの調整
方向転換の動作をした時に、2番サーボのサーボホーンが左右の脚で 干渉しそうになっていました。5番サーボが動いた時の干渉チェックを すっかり忘れていました。
胴体の整形
歩行パターンの作成
2L1v6の直進パターンは1サイクルに4点停止する場所がありましたが、これを 2点に変更し、1サイクルの時間も短くしてみました。
以前と比較して多少歩行の速度は上がりましたが、記録した動画を見たところでは 右脚と左脚の動きの差が大きいので、まだ関節パラメーターに調節が必要なようです。
歩行パターン&操縦プログラムの作成
路面との相性
重心移動のタイミングなどをいろいろといじっていると、時々うまく歩くパターンが 見つかることがあります。といったわけで、歩くかどうかはソフト次第という気がしています。 ひとまずはROBO-ONEのリングに比較的近い机の上で調整しています。 将来は路面の状況によって歩き方(歩行パターン)を自働切換えする機能をつけたいと 考えています。(いつになるやら分かりませんが)
ジャイロのゲイン
ちなみにゲインの調整はRCジャイロ自体のボリューム等によるゲイン調整機能は 触らずに、メインCPU内部の計算にて行っています。ジャイロ本体のゲインは CPUの信号読み取り分解能といいあんばいになる位置に固定してあります。
歩行パターン&操縦プログラムの作成
操縦プログラムの方は、アルゴリズムを整理する作業を継続中です。
肩のRCサーボの配線
カメラとPSDの位置
しかし、2足歩行ロボットの場合は転倒のことを考えなければならないと思うので、 マストの上は壊れやすそうです。
PSDの取り付け位置に関しては、カメラといっしょにマウントすると、首振りの機構を 兼用でき、カメラに映っているものまでの測距も出来て都合が良いと思えました。
ここまではカメラとPSDともに1個ずつ装備を前提に考えていましたが、ロボットなので 目は2つとか、頭部(脳のそば)みたいな脊椎動物の進化の制約がありません、 数に関しても、死角が無くなるような配置で多数のカメラを装備したり、1つで360度 全周が映るタイプのカメラを混ぜる等非常に多彩な配置が可能だと思いました。 また、装備の位置に関しても自由ですので、例えば手とか足の先みたいな場所も グリップ対象に接近した像を捉えたり、足を下ろす場所を調べたりするうえで 良さそうに思いました。
こんな風にいろいろと考えた結果、電力、スペースや積載重量には余裕がありますがCPUの 処理能力と通信能力に余裕が無いので、カメラ、PSD各1つづつを 正面と足元(ライントレースやボール探しが出来るように) が最低限見える胴体前面に2自由度の雲台に載せて取り付けるのが良いだろうという結論に 達しました。
制御波形要素データ出力レートの変更
腕の振り
変換係数の調整
足を小ぶりに作った場合、3%の変化は無視できない重心変化です。ロボコン等調整時間 や場所が不十分な場合に問題だと思いました。困ったものです。足裏の荷重分布を 取れるようになるまでは、もう一回り大きな足に交換しようかと思いました。
通信速度の変更
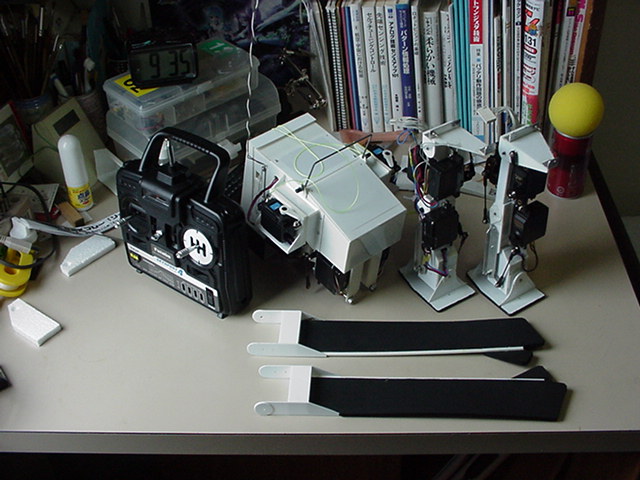
搬送準備
操縦ソフトの改善
攻撃といえば、第2回のROBO-ONEでは空振りが目立ちました。攻撃するかどうかは 人が判断するのが良いと思いますが、手や足が相手に届くかどうかの間合いを見て攻撃動作に うつるタイミングを計るのは自動にするのが良いと思いました。